Redressement
1. Introduction
Le redressement consiste à convertir une tension alternative de valeur moyenne nulle (le plus souvent sinusoïdale) en une tension positive, de valeur moyenne positive. Le plus souvent, elle est associée à un filtrage passe-bas qui permet d'obtenir une tension quasi constante. Le redressement associé au filtrage constitue une conversion alternatif-continu (AC-DC).
Dans ce document, on considère la simulation de circuits de redressement utilisant des diodes. La diode peut être vu comme un commutateur dont l'état dépend du courant qui la traverse et de la tension à ses bornes. Les premières simulations reposent sur le modèle de diode idéale :
Figure pleine page{kind=link}
Les deux états sont :
- Lorsque U<0, la diode est bloquée : le courant est nul et elle est équivalente à un interrupteur ouvert.
- Lorsque I>0, la diode est passante : la tension est nulle et elle est équivalente à interrupteur fermé. La flèche rouge sur le schéma équivalent indique le sens du courant positif.
Avec ce modèle, la diode est donc un interrupteur commandé par l'état du circuit. Lorsque les diodes d'un circuit sont dans un état donné, le circuit obéit à des équations différentielles linéaires (à condition bien sûr que les autres dipôles soient tous linéaires). La simulation d'un circuit contenant des diodes et des éléments linéaires (R,L,C) consiste à déterminer l'état de ces diodes. Lorsque l'état est connu, l'évolution du système peut être obtenu par résolution des équations différentielles linéaires, en particulier par résolution numérique.
Lorsqu'une diode est dans un état, on détermine le moment où elle change d'état au moyen de la règle suivante :
- Si la diode est bloquée (I=0 et U<0), elle devient passante lorsque la tension U s'annule pour devenir positive.
- Si la diode est passante (U=0 et I>0), elle devient bloquante lorsque le courant I s'annule pour devenir négatif.
Le fonctionnement d'un circuit comportant plusieurs diodes et soumis en entrée à une tension variable subit une séquence de commutation qu'il faudra déterminer au préalable.
2. Redressement mono-alternance
2.a. Redressement avec filtrage inductif
Dans le circuit suivant, le redressement est effectué par une seule diode. R peut être la résistance de charge et l'ajout de L permet d'effectuer un filtrage RL. Dans certains cas, la charge elle-même est inductive.
Figure pleine page{kind=link}
La tension d'entrée est . À l'instant initial (t=0), cette tension est nulle et toutes les autres grandeurs sont supposées nulles. Au début, on a V=0 et Ve>0 donc la diode est passante (état 1). L'équation différentielle vérifiée par le courant dans la charge (qui est aussi le courant débité par la source) est :
La diode passe à l'état bloquant (état 2) lorsque i s'annule pour devenir négatif. Lorsque cela se produit, la tension Ve est nécessairement négative. Dans l'état 2, on a simplement i=0 et V=0. La diode passe à l'état passant lorsque Ve devient nulle ou positive.
La fonction suivante effectue la simulation en intégrant l'équation différentielle par la méthode d'Euler. Pour ce circuit simple, une résolution entièrement analytique est possible mais dans d'autres circuits la détermination de l'état du circuit (tensions et courants) au moment d'un changement d'état peut nécessiter une résolution numérique d'équations algébriques. La méthode de simulation pas à pas par la méthode d'Euler dispense de ce type de résolution et permet donc, de manière simple et universelle, d'effectuer la simulation de ce type de circuits.
import numpy as np
from matplotlib.pyplot import *
def simulation1(E,f,L,R,tmax,dt):
w = 2*np.pi*f
etat = 1
t = 0
i = 0
data = [[0,0,0,0]] #t,i,Ve,V
while t<tmax:
t += dt
Ve = E*np.sin(w*t)
if etat==1:
i += (Ve/L-R/L*i)*dt
data.append([t,i,Ve,Ve])
if i<=0: etat+=1
elif etat==2:
i = 0
data.append([t,i,Ve,0])
if Ve>=0: etat=1
data = np.array(data)
return data[:,0],data[:,1],data[:,2],data[:,3]
Le facteur de puissance est défini comme le rapport de la puissance moyenne délivrée par la source par le produit de la tension efficace et du courant efficace. Pour un circuit linéaire, le facteur de puissance est égale à , où est le déphasage entre la tension et le courant de la source. Pour un circuit non linéaire, il s'agit du déphasage entre la tension (qui est sinusoïdale) et du fondamental du courant. La fonction suivante calcule le facteur de puissance en utilisant la dernière période des signaux :
def facteurP(t,Us,Is,f):
dt = t[1]-t[0]
N = int(1/(f*dt))
i = len(Us)-N
j = len(Us)
Ueff = np.std(Us[i:j])
Ieff = np.std(Is[i:j])
return np.mean(Us[i:j]*Is[i:j])/(Ueff*Ieff)
Le facteur de puissance est compris entre 0 et 1. Plus il est proche de 1, moins la source devra fournir un courant important pour fournir une puissance donnée, ce qui est souhaitable. Certaines sources ont une limite du courant et si le facteur de qualité est bas il s'en suit une limite de la puissance délivrable relativement basse.
L'efficacité du filtrage est évaluée en comparant la période avec le rapport L/R. Voici une simulation avec une valeur de L relativement faible :
f=100
E=10
L=10e-3
R = 5
t,i,Ve,V = simulation1(E,f,L,R,0.05,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,i,f)
title("Kp = %0.2f"%Kp)
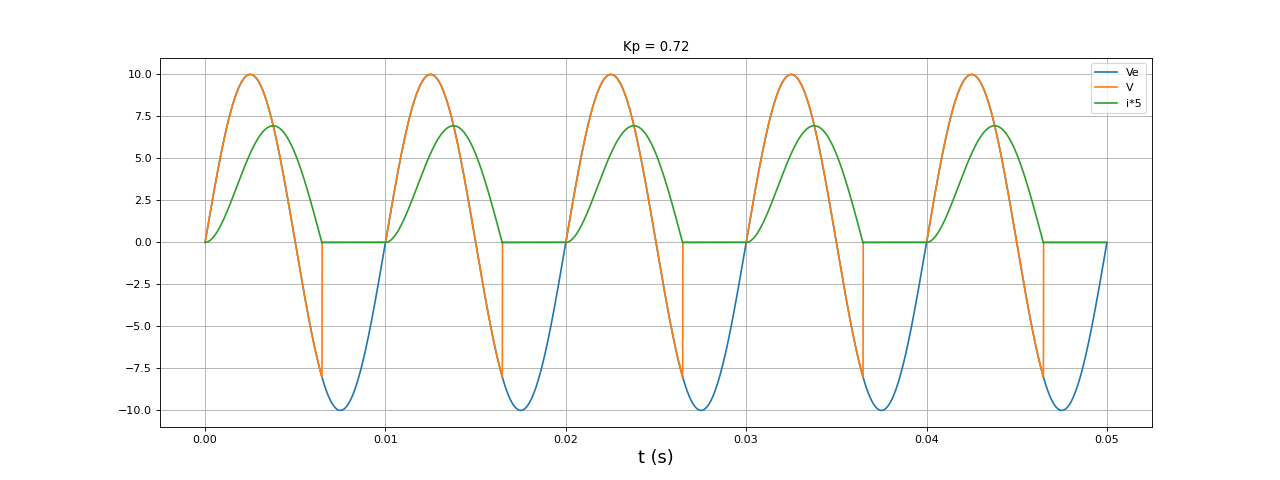 fig1.pdf
fig1.pdf
Voici la simulation avec une valeur de L dix fois plus grande :
f=100
E=10
L=100e-3
R = 5
t,i,Ve,V = simulation1(E,f,L,R,0.05,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,i,f)
title("Kp = %0.2f"%Kp)
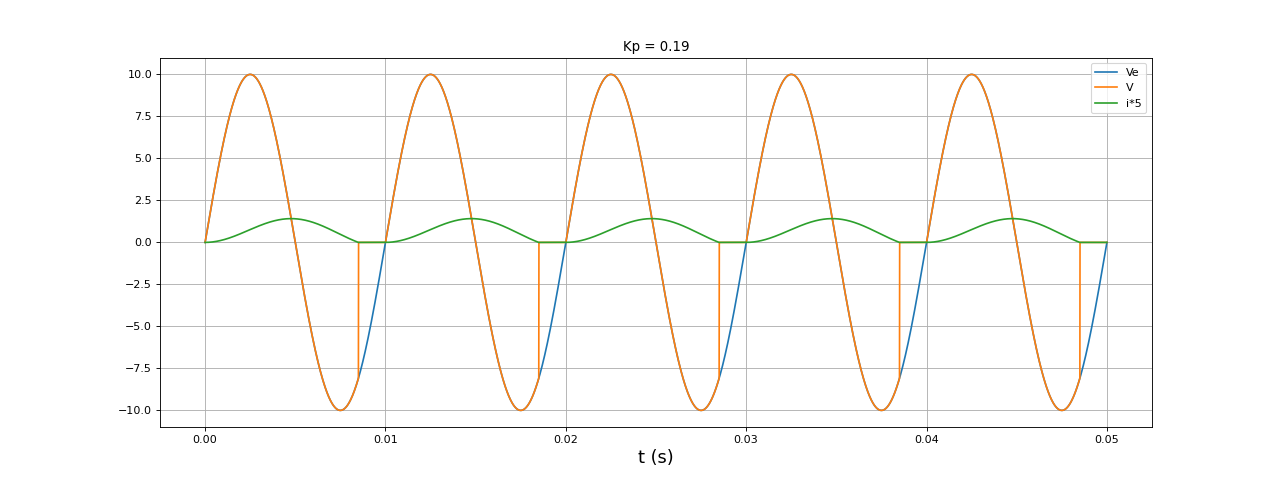 fig2.pdf
fig2.pdf
L'intervalle de temps où le courant est nul est moins grand mais sa valeur moyenne est plus basse. Le déphasage entre le fondamental du courant et la tension est à l'évidence proche de 90 degrés, ce qui explique la faiblesse du facteur de puissance. Par ailleurs, la valeur moyenne de la tension V dépend de la résistance de charge R. Voici la simulation précédente avec une résistance 10 fois plus grande :
R = 50
t,i,Ve,V = simulation1(E,f,L,R,0.05,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,i,f)
title("Kp = %0.2f"%Kp)
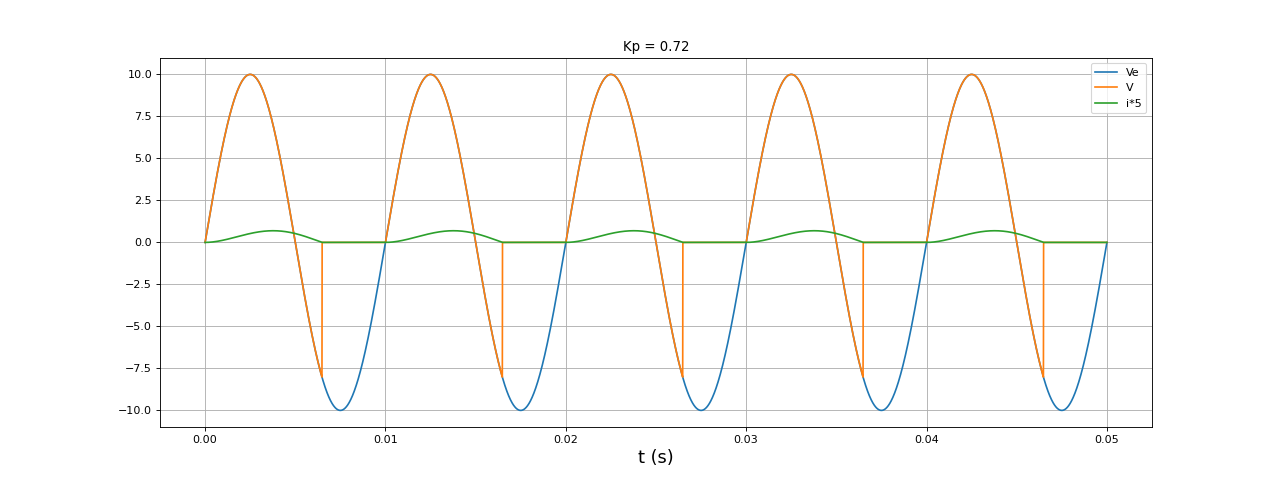 fig3.pdf
fig3.pdf
La valeur moyenne de V (qui est positive) est d'autant plus grande que la résistance de charge est grande. Autrement dit, la moyenne de V est d'autant plus basse que le courant est grand. La simulation suivante permet de calculer les valeurs moyennes pour différentes valeurs de la résistance de charge :
Vmoy = []
Imoy = []
for R in [1,5,10,20,40,80]:
t,i,Ve,V = simulation1(E,f,L,R,0.05,1e-5)
Vmoy.append(V.mean())
Imoy.append(i.mean())
figure()
plot(Imoy,Vmoy,"o")
grid()
xlim(0,0.2)
ylim(0,3)
xlabel("I moy (A)",fontsize=16)
ylabel("V moy (V)",fontsize=16)
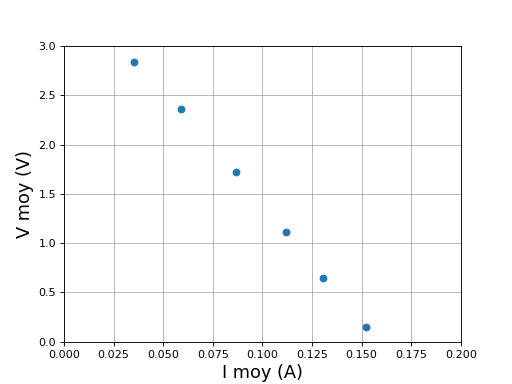 fig4.pdf
fig4.pdf
Une première amélioration de ce circuit consiste à ajouter une diode de roue libre :
Figure pleine page{kind=link}
Dans ce circuit qui comporte deux diodes, il y a a priori quatre états de commutation mais seulement deux sont possibles.
Au début, la diode D1 est passante donc V=Ve (état 1). En conséquence, la diode D2 devient passante lorsque Ve devient négatif. Mais si D2 est passante alors V=0, ce qui est incompatible avec D1 passante. En conséquence, la fermeture de D2 s'accompagne de l'ouverture de D1 (état 2). Lorsque Ve redevient positif, la diode D1 devient à nouveau passante et, pour la même raison que précédemment, D2 est nécessairement bloquante. On a donc deux états possibles. Les deux diodes commutent en opposition et la commutation est commandée par le signe de Ve.
Dans l'état 1, l'équation différentielle pour i(t) est la même que précédemment. Dans l'état 2, elle est :
Contrairement au circuit précédent, il faut distinguer le courant i dans la charge et le courant ie qui sort de la source (courant d'entrée).
def simulation2(E,f,L,R,tmax,dt):
w = 2*np.pi*f
etat = 1
t = 0
i = 0
data = [[0,0,0,0,0]] #t,i,ie,Ve,V
while t<tmax:
t += dt
Ve = E*np.sin(w*t)
if etat==1:
i += (Ve/L-R/L*i)*dt
data.append([t,i,i,Ve,Ve])
if Ve <=0: etat+=1
elif etat==2:
i += -R/L*i*dt
data.append([t,i,0,Ve,0])
if Ve>=0: etat=1
data = np.array(data)
return data[:,0],data[:,1],data[:,2],data[:,3],data[:,4]
Voici une simulation avec L faible :
f=100
E=10
L=10e-3
R = 5
t,i,ie,Ve,Vd = simulation2(E,f,L,R,0.05,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,Vd,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
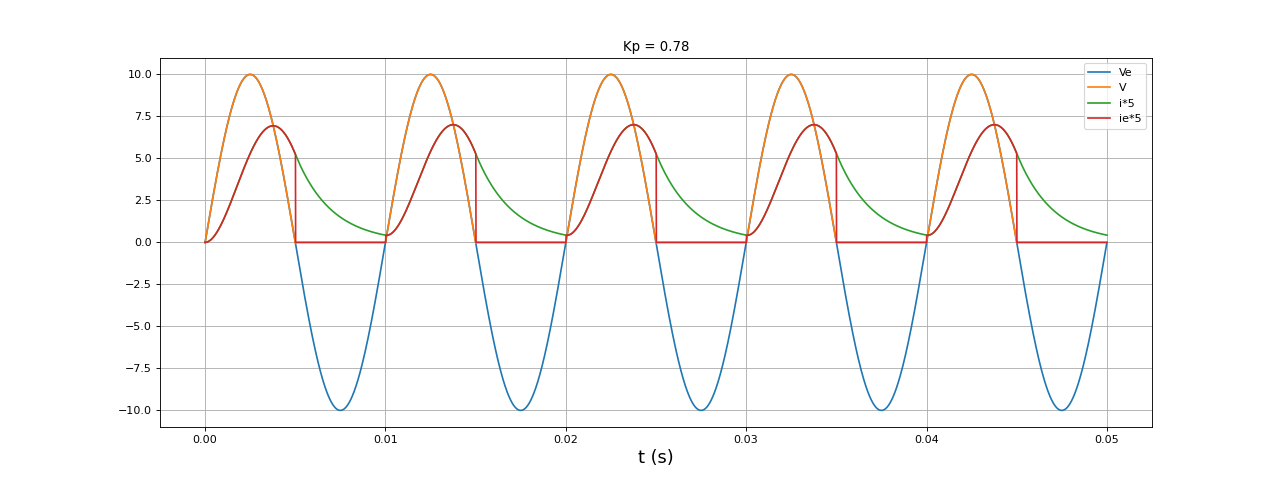 fig5.pdf
fig5.pdf
L'effet le plus important de l'ajout d'une diode de roue libre est le fait que la tension V s'annule pour les valeurs négatives de la tension d'entrée. En conséquence, la valeur moyenne de V ne dépend que de l'amplitude de la tension d'entrée et pas de la résistance de charge (elle en dépend dans le circuit sans diode de roue libre).
Voici une simulation avec L 10 fois plus grand (on doit augmenter la durée de la simulation) :
f=100
E=10
L=100e-3
R = 5
t,i,ie,Ve,V = simulation2(E,f,L,R,0.1,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
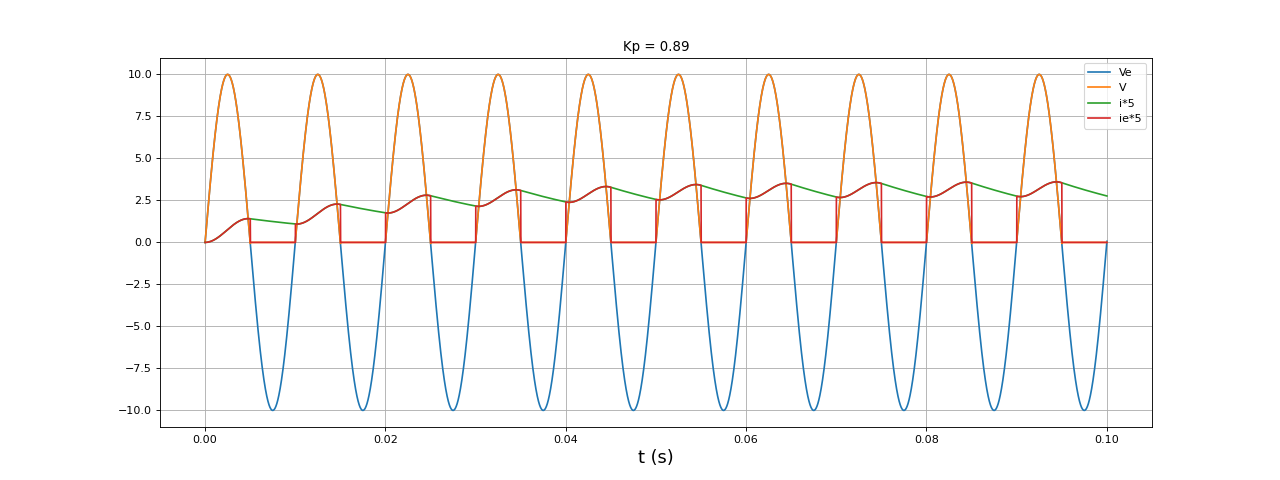 fig6.pdf
fig6.pdf
À même fréquence, le facteur de puissance de ce circuit (avec la diode de roue libre) est beaucoup plus grand que celui du circuit sans la diode de roue libre. Cela signifie que, pour une puissance moyenne reçue par la charge donnée, la source aura moins de courant à fournir.
Avec la diode de roue libre ajoutée, on obtient un courant dont le taux d'ondulation est nettement plus bas et dont la valeur moyenne est plus élevée. En augmentant, la fréquence, on devrait réduire encore le taux d'ondulation du courant :
f=500
E=10
L=100e-3
R = 5
t,i,ie,Ve,V = simulation2(E,f,L,R,0.1,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
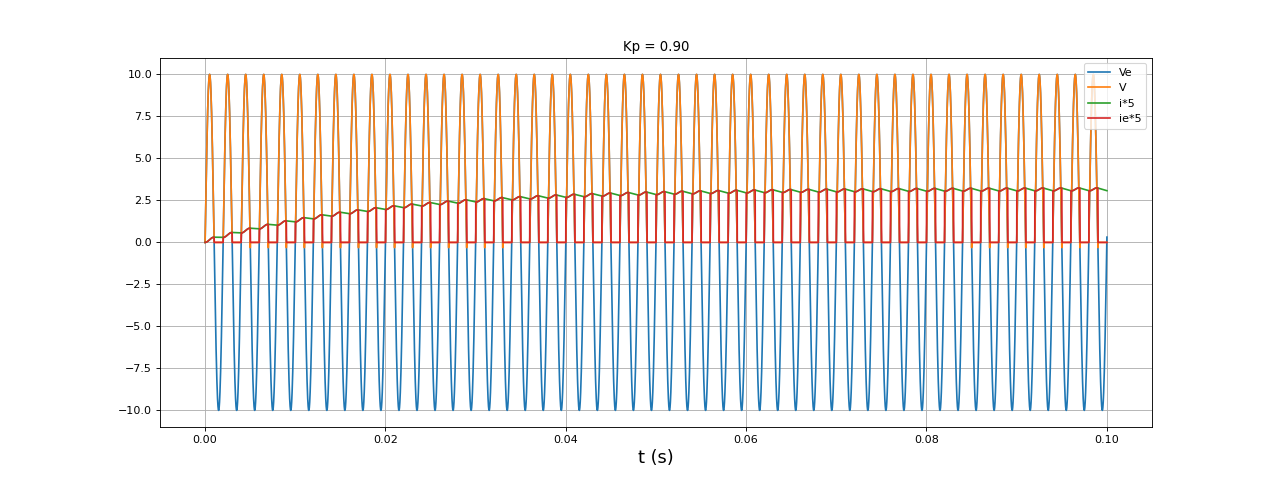 fig7.pdf
fig7.pdf
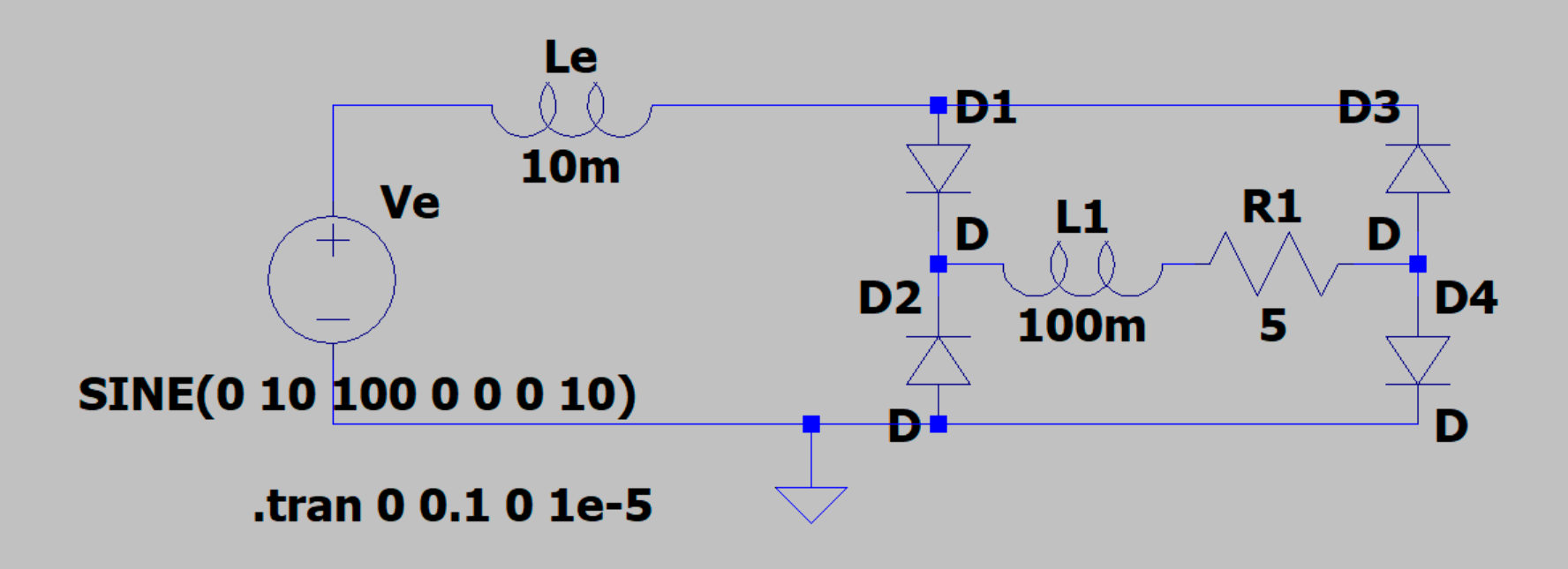
Le circuit précédent peut être modifié en ajoutant une inductance de commutation [1] :
Figure pleine page{kind=link}
Dans l'état 1 (D1 passante et D2 bloquante) on a i1=i et :
donc :
i est toujours positif car un courant négatif serait incompatible avec les diodes. Lorsque V s'annule la diode D2 devient passante. La diode D1 reste passante car son ouverture violerait la continuité du courant dans Le. À l'état 2, les deux diodes sont donc passantes. On a dans cet état :
L'état 2 cesse lorsque ie s'annule pour devenir négatif car la diode D1 devient alors bloquante alors que la diode D2 reste passante (état 3). Dans l'état 3 on a :
L'état 3 cesse lorsque Ve s'annule pour devenir positif. On passe alors à l'état 4, où les deux diodes sont passantes. Les équations différentielles dans l'état 4 sont les mêmes que dans l'état 2. L'état 4 cesse lorsque le courant dans D2 s'annule pour devenir négatif, c'est-à-dire lorsque .
def simulation3(E,f,Le,L,R,tmax,dt):
w = 2*np.pi*f
etat = 1
t = 0
i = 0
ie = 0
data = [[0,0,0,0,0]] #t,i,ie,Ve,V
while t<tmax:
t += dt
Ve = E*np.sin(w*t)
if etat==1:
i += (Ve/(L+Le)-R/(L+Le)*i)*dt
ie = i
V = L/(L+Le)*Ve+R*Le/(L+Le)*i
data.append([t,i,ie,Ve,V])
if V <=0: etat+=1
elif etat==2:
i += -R/L*i*dt
ie += Ve/Le*dt
V = 0
data.append([t,i,ie,Ve,V])
if ie<=0: etat+=1
elif etat==3:
i += -R/L*i*dt
ie = 0
data.append([t,i,ie,Ve,0])
if Ve>=0: etat+=1
elif etat==4:
i += -R/L*i*dt
ie += Ve/Le*dt
V = 0
data.append([t,i,ie,Ve,V])
if ie>=i: etat=1
data = np.array(data)
return data[:,0],data[:,1],data[:,2],data[:,3],data[:,4]
Voici une simulation avec L faible :
f=100
E=10
Le = 10e-3
L=10e-3
R = 5
t,i,ie,Ve,V = simulation3(E,f,Le,L,R,0.05,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
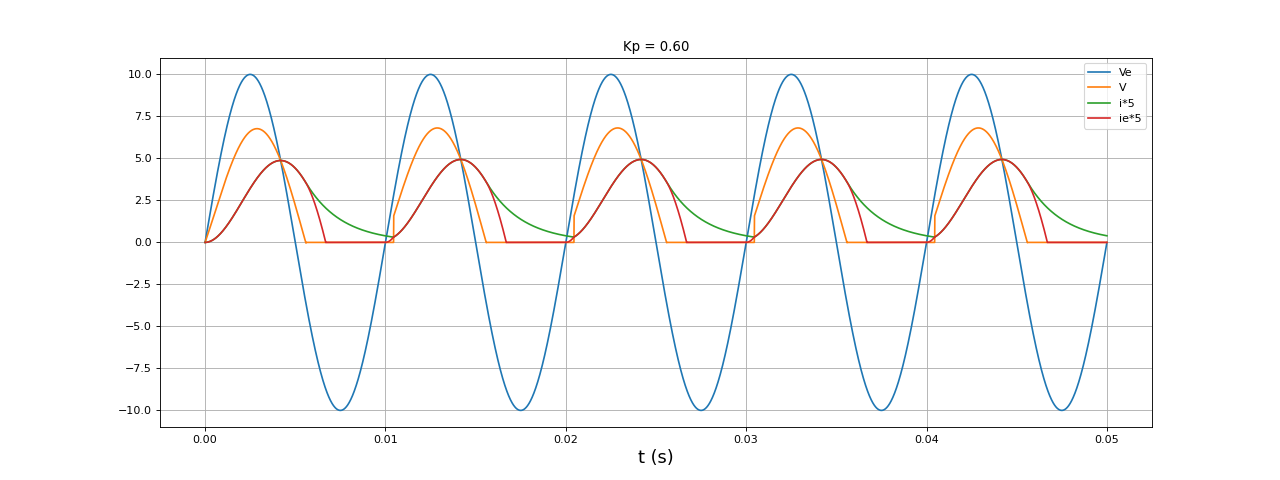 fig8.pdf
fig8.pdf
et une autre avec L 10 fois plus grand :
f=100
E=10
Le = 10e-3
L=100e-3
R = 5
t,i,ie,Ve,V = simulation3(E,f,Le,L,R,0.1,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
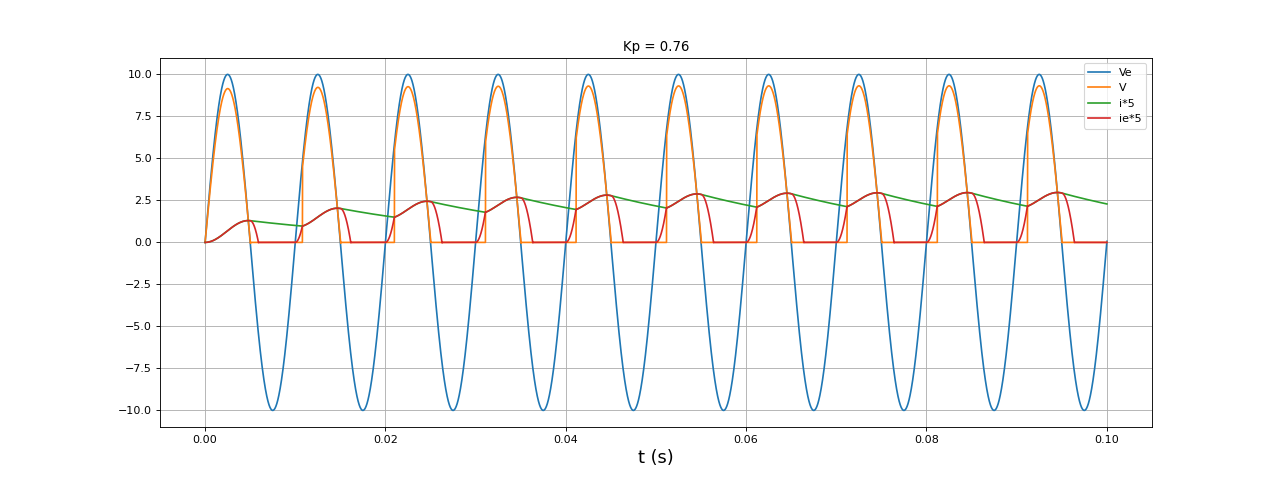 fig9.pdf
fig9.pdf
Voici la tension V moyenne en fonction du courant i moyen :
Vmoy = []
Imoy = []
for R in [1,2,5,10,20,40,80]:
t,i,ie,Ve,V = simulation3(E,f,Le,L,R,0.1,1e-5)
N = len(V)
Vmoy.append(V[N//2:N].mean())
Imoy.append(i[N//2:N].mean())
figure()
plot(Imoy,Vmoy,"o")
grid()
xlim(0,3)
ylim(0,7)
xlabel("I moy (A)",fontsize=16)
ylabel("V moy (V)",fontsize=16)
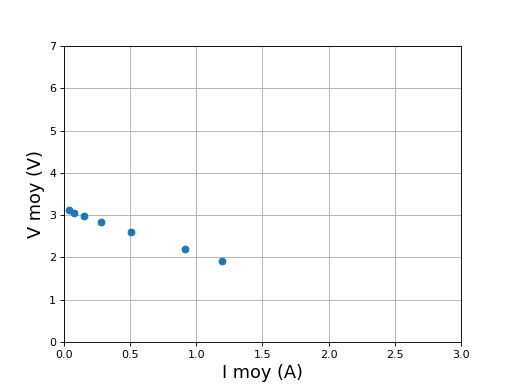 fig10.pdf
fig10.pdf
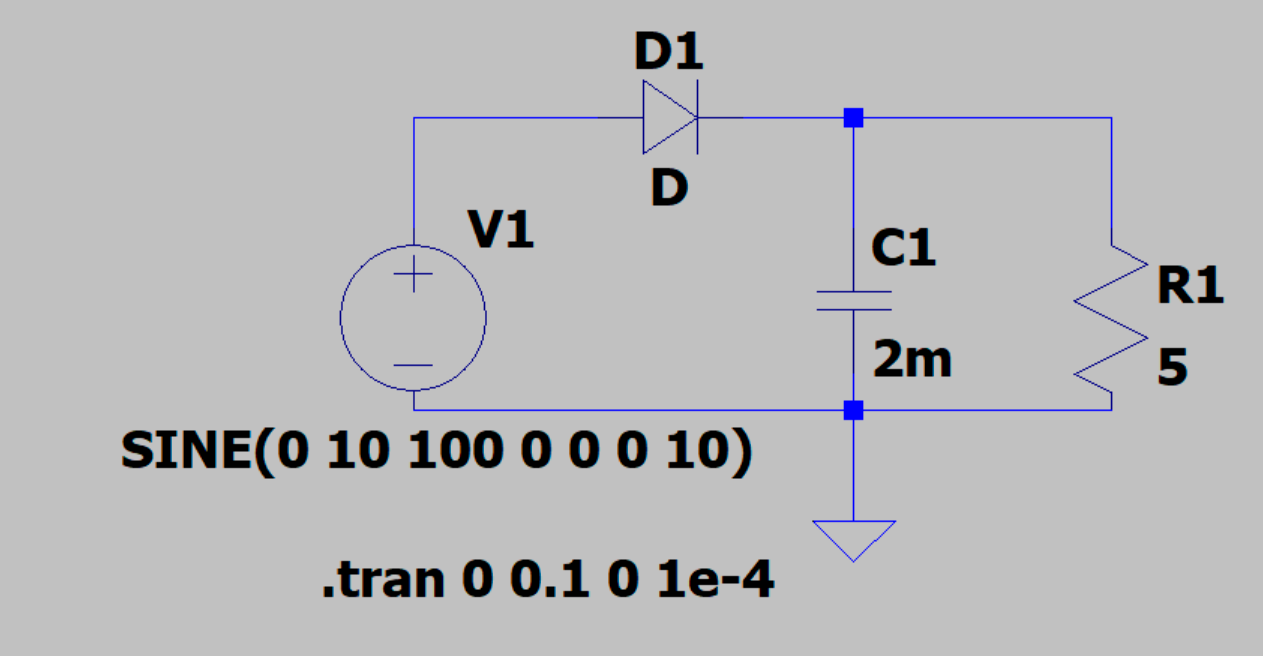
2.b. Redressement avec filtrage capacitif
Dans le circuit suivant, R est la résistance de charge. Le filtrage est réalisé par la capacité C.
Figure pleine page{kind=link}
La tension d'entrée est . À l'instant initial (t=0), cette tension est nulle et toutes les autres grandeurs sont supposées nulles. Au début, on a V=0 et Ve>0 donc la diode est passante (état 1) et V=Ve. Dans cet état, on a :
La diode devient bloquante lorsque Ve commence à décroître, c'est-à-dire lorsque sa dérivée s'annule. On passe alors à l'état 2, pour lequel ie=0 et :
On revient à l'état 1 lorsque V devient inférieur ou égal à Ve.
Juste après le passage à l'état 1, la tension V décroît car la capacité se décharge dans la résistance. Si cette décroissance est plus rapide que la décroissance de Ve (si C ou R ne sont pas assez grandes), la diode revient immédiatement l'état passant (état 1) puis à l'état bloquant puisque la dérivée de Ve est toujours négative. Il se produit donc, pendant un court intervalle de temps, une alternance des deux états, mais il s'agit d'un artefact dû au modèle de diode idéale.
def simulation4(E,f,C,R,tmax,dt):
w = 2*np.pi*f
etat=1
t = 0
i = 0
data = [[0,0,0,0,0]] #t,i,ie,Ve,V
while t<tmax:
t += dt
Ve = E*np.sin(w*t)
dVe = E*w*np.cos(w*t)
if etat==1:
ie = Ve/R+C*dVe
i = Ve/R
V = Ve
data.append([t,i,ie,Ve,V])
if dVe<=0: etat+=1
elif etat==2:
ie = 0
i += -i/(R*C)*dt
V = R*i
data.append([t,i,ie,Ve,V])
if Ve>V: etat=1
data = np.array(data)
return data[:,0],data[:,1],data[:,2],data[:,3],data[:,4]
f=100
E=10
C=2e-3
R = 5
t,i,ie,Ve,V = simulation4(E,f,C,R,0.1,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i,label="i")
plot(t,ie,label="ie")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
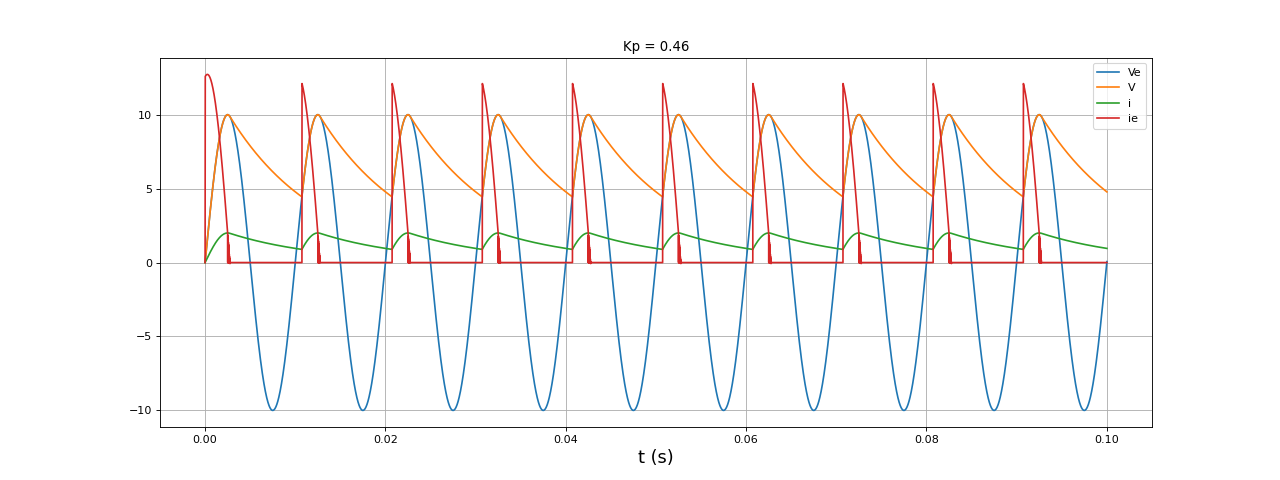 fig11.pdf
fig11.pdf
On observe bien sur le courant i1, comme prévu, une alternance des deux états juste après le maximum de Ve :
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i,label="i")
plot(t,ie,label="ie")
xlabel("t (s)",fontsize=16)
grid()
xlim(0.09,0.1)
legend(loc="upper right")
title("Kp = %0.2f"%Kp)
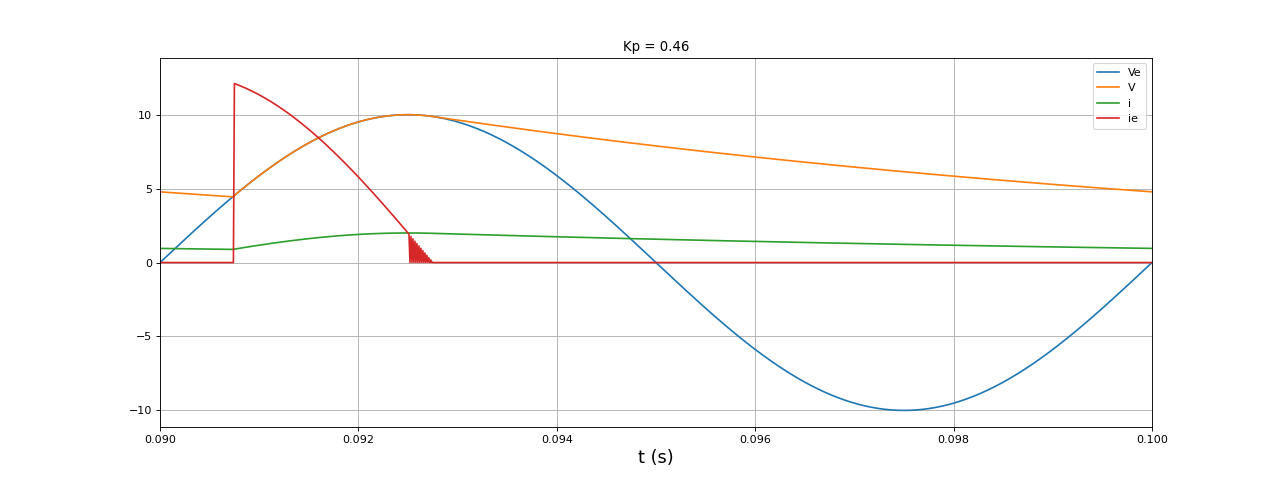 fig12.pdf
fig12.pdf
Voici une simulation avec une valeur de capacité plus grande :
f=100
E=10
C=10e-3
R = 5
t,i,ie,Ve,V = simulation4(E,f,C,R,0.1,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i,label="i")
plot(t,ie,label="ie")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
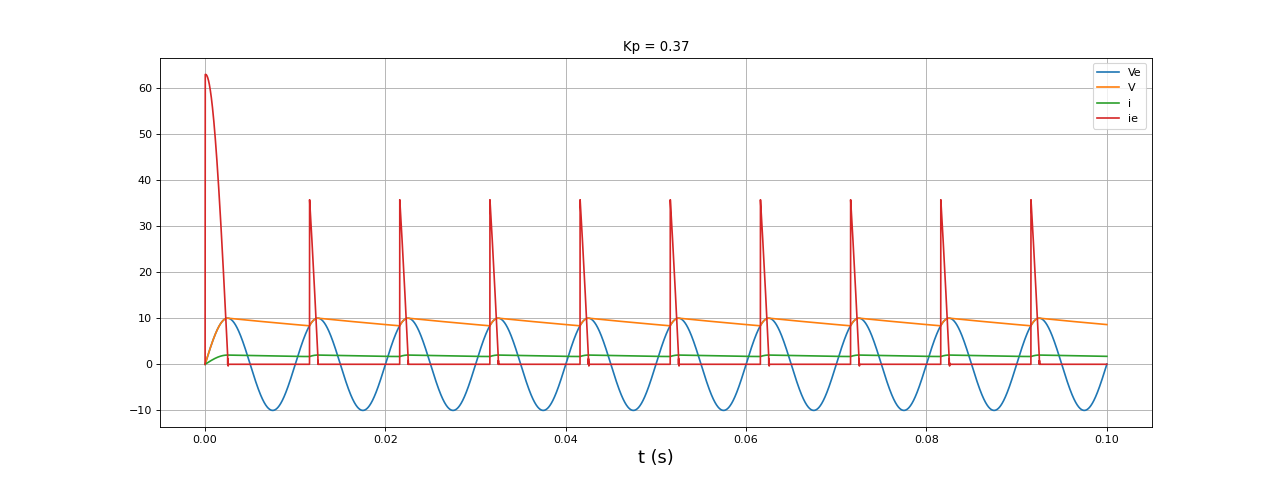 fig13.pdf
fig13.pdf
Le principal inconvénient de ce circuit apparaît sur ces courbes : la source doit fournir un courant très fort lorsque la diode est passante.
Voici une simulation de ce circuit avec LTspice :
[t,Ve,V,i,ie] = np.loadtxt("demiOnde-RC-1.txt",unpack=True,skiprows=1)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i,label="i")
plot(t,-ie,label="ie")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
 fig14.pdf
fig14.pdf
Cette simulation montre l'effet du seuil de tension de la diode. On voit aussi que les bascules de la diode après le passage de Ve par son maximum ne se produisent pas et qu'ils sont bien dûs au modèle de la diode idéale.
3. Redressement double-alternance
3.a. Filtrage inductif
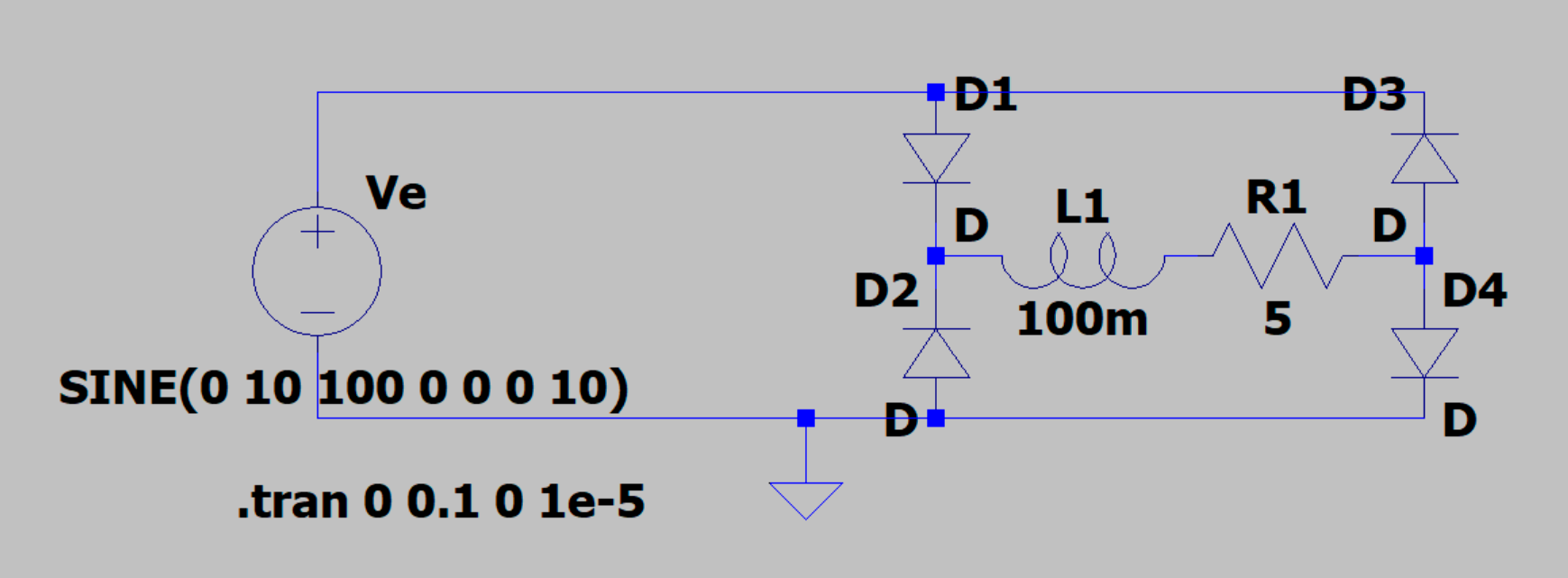
Le circuit 2 présenté plus haut (avec deux diodes) peut être complété afin de faire passer le courant aussi pour les alternances négatives de la tension d'entrée. Le circuit obtenu comporte quatre diodes formant un pont de diodes :
Figure pleine page{kind=link}
Le prix à payer pour obtenir le redressement double alternance et l'impossibilité d'avoir une masse commune entre la source et la charge.
Comme précédemment, on pose et on suppose qu'à l'instant initial toutes les grandeurs sont nulles. Au début (état 1), seules les diodes D1 et D4 sont passantes. On a donc V=Ve et l'équation différentielle suivante :
La diode D2 devient passante lorsque Ve s'annule pour devenir négative, ce qui a pour effet d'annuler la tension sur la cathode de D1 donc de rendre celle-ci bloquante (puisque la tension sur son anode est négative). Simultanément, D3 devient passante puisque la tension à son anode est nulle et la tension à sa cathode devient négative. La tension à l'anode de D4 devient donc négative alors que sa cathode est à la masse (de la source) donc D4 devient bloquante. On a donc un état 2 où seules les diodes D2 et D3 sont passante. Dans l'état 2, on a V=-Ve, ie=-i et :
Le retour à l'état 1 se fait lorsque la tension Ve s'annule pour devenir positive.
La simulation est similaire à celle donnée plus haut pour le redressement mono-alternance avec la diode de roue libre : l'état est simplement déterminé par le signe de Ve.
def simulation5(E,f,L,R,tmax,dt):
w = 2*np.pi*f
etat=1
t = 0
i = 0
data = [[0,0,0,0,0]] #t,i,ie,Ve,V
while t<tmax:
t += dt
Ve = E*np.sin(w*t)
if etat==1:
i += (Ve/L-R/L*i)*dt
data.append([t,i,i,Ve,Ve])
if Ve <=0: etat+=1
elif etat==2:
i += (-Ve/L-R/L*i)*dt
data.append([t,i,-i,Ve,-Ve])
if Ve>=0: etat=1
data = np.array(data)
return data[:,0],data[:,1],data[:,2],data[:,3],data[:,4]
Voici une simulation avec L faible :
f=100
E=10
L=10e-3
R = 5
t,i,ie,Ve,V = simulation5(E,f,L,R,0.1,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
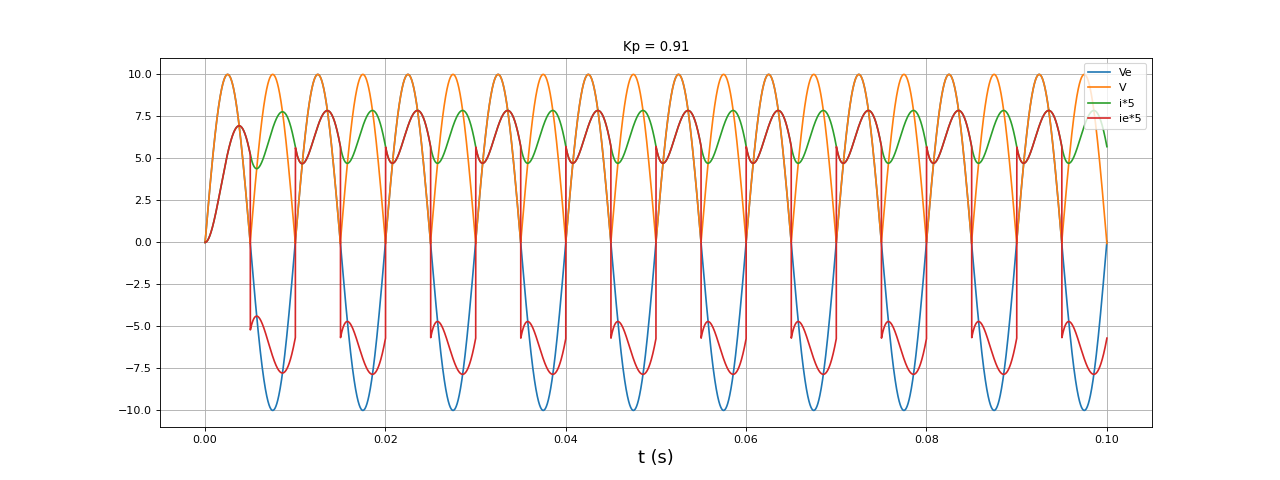 fig15.pdf
fig15.pdf
puis avec une valeur de L dix fois plus grande :
f=100
E=10
L=100e-3
R = 5
t,i,ie,Ve,V = simulation5(E,f,L,R,0.1,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
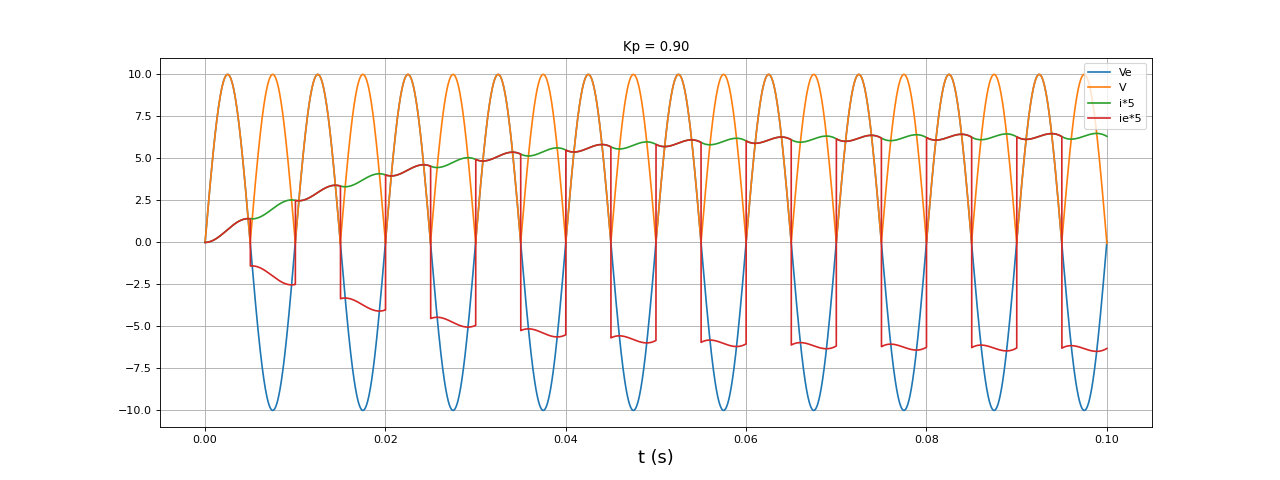 fig16.pdf
fig16.pdf
Lorsque , le courant i dans la charge est quasi constant. Ce courant dépend de l'amplitude de la tension d'entrée et de R.
Voici la tension V moyenne en fonction du courant i moyen (on fait varier la résistance de charge):
Vmoy = []
Imoy = []
for R in [1,2,5,10,20,40,80]:
t,i,ie,Ve,V = simulation5(E,f,L,R,0.1,1e-5)
N = len(V)
Vmoy.append(V[N//2:N].mean())
Imoy.append(i[N//2:N].mean())
figure()
plot(Imoy,Vmoy,"o")
grid()
xlim(0,3)
ylim(0,7)
xlabel("I moy (A)",fontsize=16)
ylabel("V moy (V)",fontsize=16)
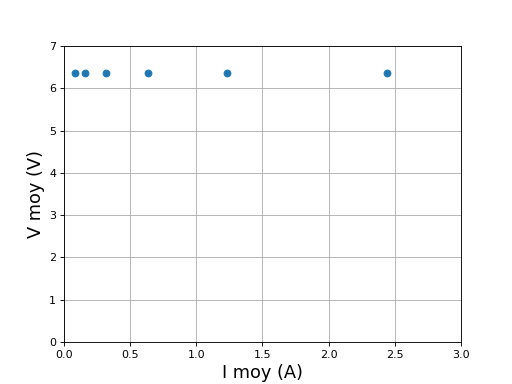 fig17.pdf
fig17.pdf
La valeur moyenne de la tension V ne dépend pas du courant moyen dans la charge, ce qui est logique puisque V est simplement a valeur absolue de Ve.
Voici une simulation du même circuit avec LTspice :
[t,Ve,Vp,Vm,i,ie] = np.loadtxt("pleineOnde-LR-1.txt",unpack=True,skiprows=1)
V = Vp-Vm
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,-i*5,label="i*5")
plot(t,-ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
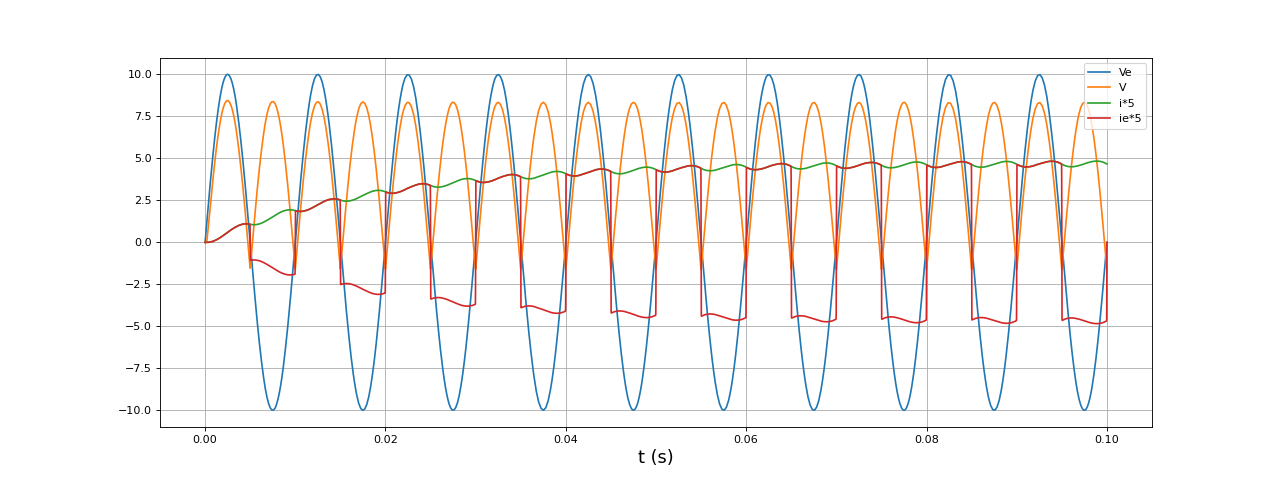 fig18.pdf
fig18.pdf
Cette simulation montre l'effet du seuil de tension des diodes : la tension V passe (très brièvement) par des valeurs négatives et le courant dans la charge est moins grand.
Dans le circuit suivant, une inductance de commutation est ajoutée :
Figure pleine page{kind=link}
Dans l'état 1, seules les diodes D1 et D4 sont passantes. On a donc ie=i et
donc :
Lorsque V s'annule pour devenir négative, D2 devient passante mais D1 reste passante car le courant dans Le est continu (l'intensité est positive). La cathode de D3 est à une différence de potentiel V par rapport à son anode donc cette diode devient passante et, comme i est positif et continu, la diode D4 reste passante. On a donc un état 2 où toutes les diodes sont passantes. Dans l'état 2, on a V=0 et
Notons i1,i2,i3,i4 les courants dans les diodes, dans le sens positif indiqué par les flèches rouges sur le schéma. La loi des nœuds conduit aux équations suivantes :
mais ce système n'admet pas de solution unique (son déterminant est nul). Il faut donc une condition supplémentaire pour déterminer les courants dans les diodes. En réalité, la tension aux bornes d'une diode n'est pas nulle et le courant est déterminée par la valeur de cette tension. Comme le montre la simulation Spice présentée plus loin, on a en fait i1=i4 et i2=i3. Dans l'état 2, on a donc :
L'état 2 cesse lorsque i1 s'annule pour devenir négative, ce qui provoque le bloquage de la diode D1 et celui de D4. La diode D3 reste passante pour maintenir la continuité de i. On a donc un état 3 où seules les diodes D2 et D3 sont passantes. Dans l'état 3, on a ie=-i et :
donc :
L'état 3 cesse lorsque V s'annule pour devenir négatif et on passe alors à l'état 4 où toutes les diodes sont passantes. Les équations pour l'état 4 sont données plus ci-dessus. On passe de l'état 4 à l'état 1 lorsque i2 s'annule pour devenir négatif.
def simulation6(E,f,Le,L,R,tmax,dt):
w = 2*np.pi*f
etat=1
t = 0
i = 0
ie = 0
data = [[0,0,0,0,0]] #t,i,ie,Ve,V
while t<tmax:
t += dt
Ve = E*np.sin(w*t)
if etat==1:
i += (Ve/(L+Le)-R/(L+Le)*i)*dt
ie = i
V = L/(L+Le)*Ve+R*(1-L/(L+Le))*i
data.append([t,i,ie,Ve,V])
if V <=0: etat+=1
elif etat==2:
i += -R/L*i*dt
ie += Ve/Le*dt
V = 0
data.append([t,i,ie,Ve,V])
if i+ie<=0: etat+=1
elif etat==3:
i += (-Ve/(L+Le)-R/(L+Le)*i)*dt
ie = -i
V = -L/(L+Le)*Ve+R*(1-L/(L+Le))*i
data.append([t,i,ie,Ve,V])
if V<=0: etat+=1
elif etat==4:
i += -R/L*i*dt
ie += Ve/Le*dt
V = 0
data.append([t,i,ie,Ve,V])
if i-ie<=0: etat=1
data = np.array(data)
return data[:,0],data[:,1],data[:,2],data[:,3],data[:,4]
Voici une simulation avec L faible :
f=100
E=10
Le = 10e-3
L=10e-3
R = 5
t,i,ie,Ve,V = simulation6(E,f,Le,L,R,0.05,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
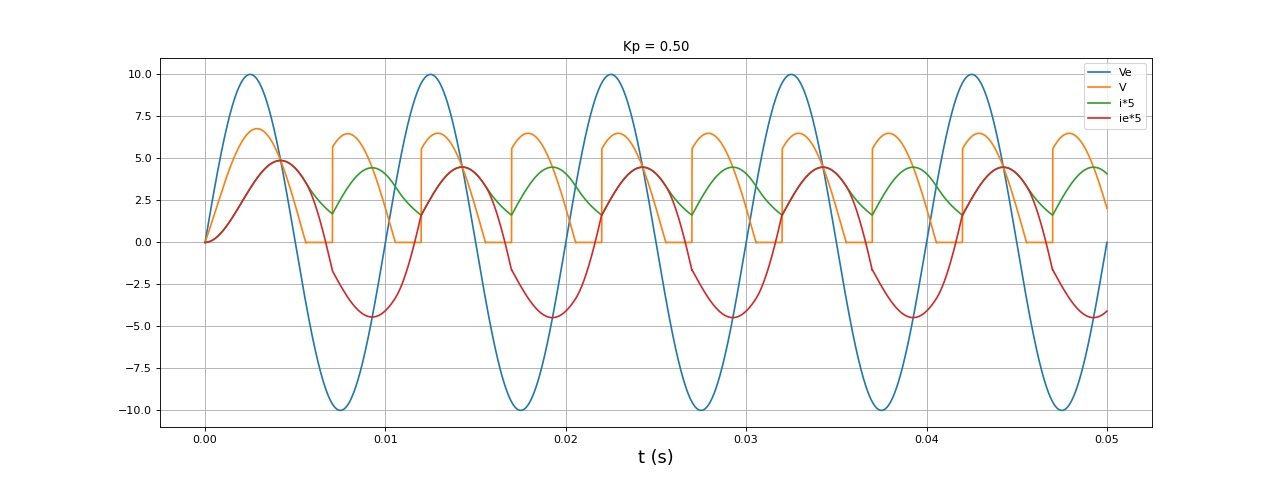 fig19.pdf
fig19.pdf
puis L dix fois plus grand :
f=100
E=10
Le = 10e-3
L=100e-3
R = 5
t,i,ie,Ve,V = simulation6(E,f,Le,L,R,0.1,1e-5)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
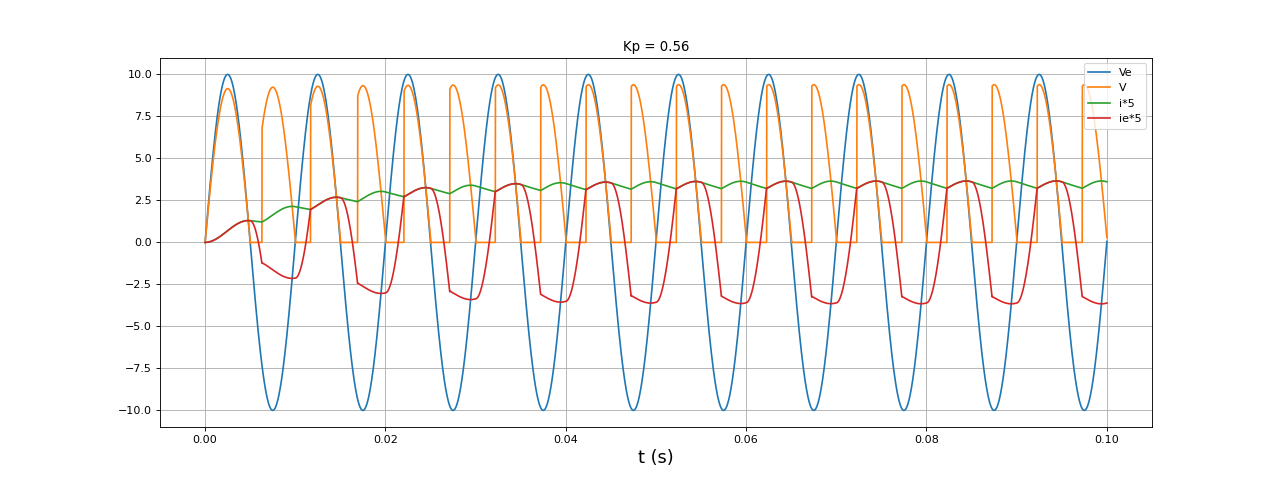 fig20.pdf
fig20.pdf
Voici la tension V moyenne en fonction du courant i moyen :
Vmoy = []
Imoy = []
for R in [1,2,5,10,20,40,80]:
t,i,ie,Ve,V = simulation6(E,f,Le,L,R,0.1,1e-5)
N = len(V)
Vmoy.append(V[N//2:N].mean())
Imoy.append(i[N//2:N].mean())
figure()
plot(Imoy,Vmoy,"o")
grid()
xlim(0,3)
ylim(0,7)
xlabel("I moy (A)",fontsize=16)
ylabel("V moy (V)",fontsize=16)
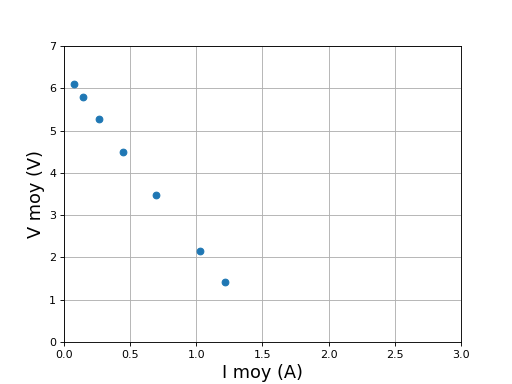 fig21.pdf
fig21.pdf
Contrairement au circuit sans l'inductance de commutation Le, la moyenne de V dépend de la moyenne de i (elle décroît linéairement avec le courant).
Voici une simulation du même circuit avec LTspice :
[t,Ve,Vp,Vm,i,ie] = np.loadtxt("pleineOnde-LLR-1.txt",unpack=True,skiprows=1)
V = Vp-Vm
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,-i*5,label="i*5")
plot(t,-ie*5,label="ie*5")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
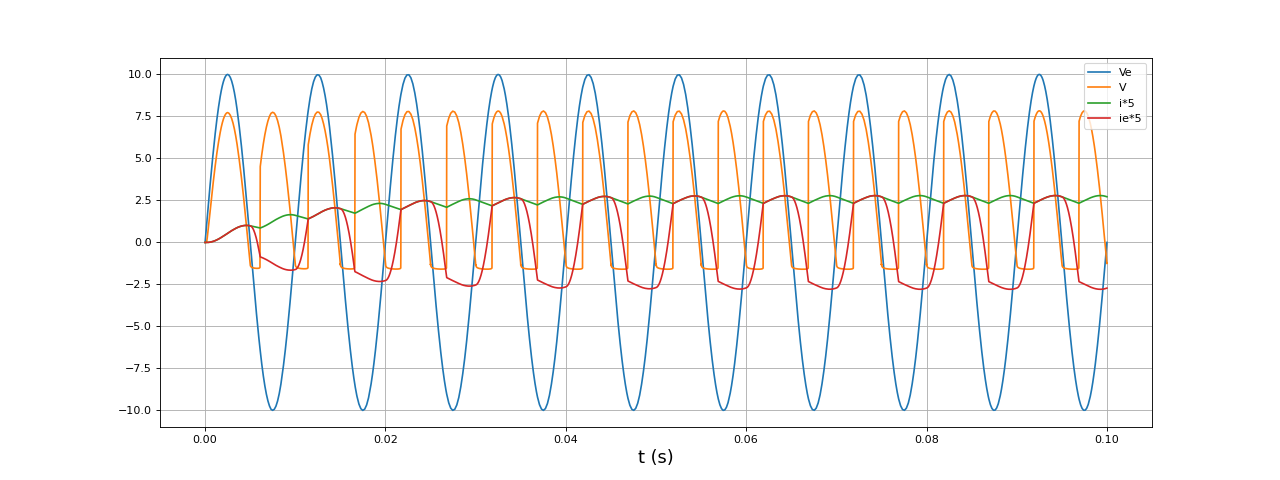 fig22.pdf
fig22.pdf
Cette simulation montre l'effet des seuils de tension des diodes : la tension V est négative dans les états 2 et 4 et le courant dans la charge est plus bas.
Voici les courants dans les diodes :
[t,i1,i2,i3,i4] = np.loadtxt("pleineOnde-LLR-diodes.txt",unpack=True,skiprows=1)
figure(figsize=(16,6))
plot(t,i1,label="i1")
plot(t,i2,label="i2")
plot(t,i3,label="i3")
plot(t,i4,label="i4")
ylabel("i (A)",fontsize=16)
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
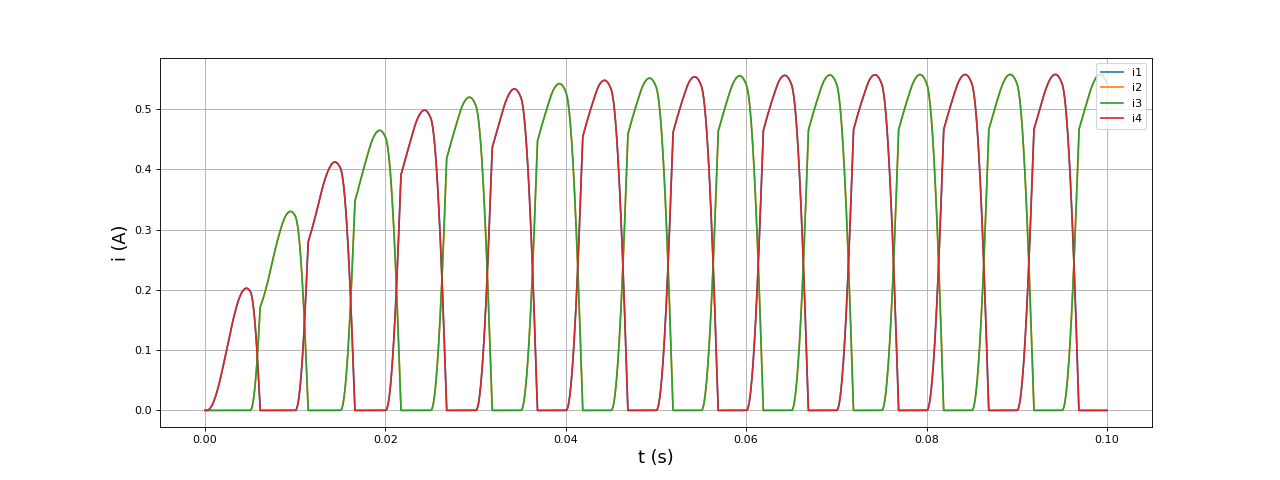 fig23.pdf
fig23.pdf
On a bien i1=i4 et i2=i3, ce qui est évident dans les états 1 et 3 mais ne l'est pas dans les états 2 et 4.
4. Simulation numérique complète
4.a. Algorithme
Dans les simulations précédentes, reposant sur le modèle de diode idéale, les états des diodes sont déterminés au préalable ainsi que les conditions qui déclenchent le passage d'un état au suivant. Le dernier exemple montre que cette tâche n'est pas toujours aisée.
Les simulations effectuées par Spice reposent sur la mise en équation complète du système. Il faut pour cela disposer d'une caractéristique de la diode permettant d'obtenir le courant sans ambiguité à partir de la tension (ou l'inverse). Autrement dit, la fonction I=f(U) doit être bijective. Voici une version simplifiée du modèle de diode utilisé par Spice [2] :
avec les valeurs suivantes : , et . Cette fonction admet une fonction inverse f-1 mais il semble qu'il n'existe pas de forme analytique de cette fonction. Déterminer U si I est donné nécessite donc la résolution d'une équation algébrique non linéaire.
def Idiode(U,Is=1e-14,U0=2.6e-2,Gmin=1e-3):
if U > -5*U0:
return Is*(np.exp(U/U0)-1)+U*Gmin
else:
return -Is+U*Gmin
U = np.linspace(-1,1,1000)
I = np.zeros(len(U))
for k in range(len(U)):
I[k] = Idiode(U[k])
figure()
plot(U,I)
grid()
ylabel("I (A)",fontsize=16)
xlabel("U (V)",fontsize=16)
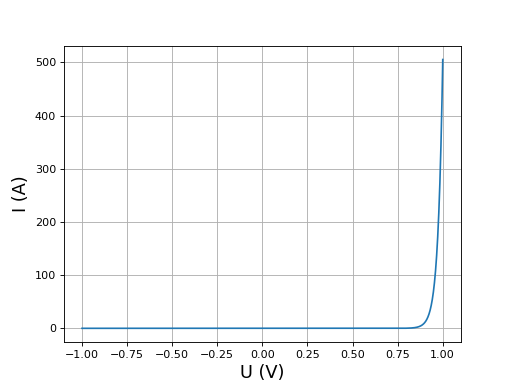 fig24.pdf
fig24.pdf
La conductance Gmin a un effet très faible sur la caractéristique mais permet d'assurer la bijectivité. Remarquons que la fonction présente une petite discontinuité en U=-U0.
Considérons comme premier exemple le circuit de redressement suivant :
Figure pleine page{kind=link}
Les trois inconnues étant V,i,ie, les trois équations sont :
Ces équations sont bien évidemment non linéaires en raison de la non linéarité de la fonction f.
L'équation différentielle peut être intégrée par la méthode d'Euler. La valeur de i étant connue, les valeurs de V et ie sont obtenues par résolution du système d'équations suivant :
Les trois inconnues varient continûment (contrairement au cas du modèle à diode idéale) donc, à chaque itération et si le pas de temps est assez petit, on connaît une valeur de (V,ie) très proche de la solution du système ci-dessus. La méthode de Newton-Raphson [3] permet d'obtenir rapidement cette solution.
Notons xi les inconnues (ici x0=V et x1=ie). Le système s'écrit :
Le développement de Taylor à l'ordre 1 s'écrit :
La matrice jacobienne est définie par :
On doit avoir :
donc est obtenu par résolution du système linéaire suivant :
où .
Afin de contrôler la convergence vers la solution, on calcule le nombre suivant [3] :
Si res est supérieur à une tolérance , on refait une itération avec un nouveau déplacement .
Pour l'exemple traité, on a :
La fonction f est définie par :
et sa dérivée :
La matrice jacobienne est :
Voici la fonction qui calcule la dérivée de f :
def deriv_Idiode(U,Is=1e-14,U0=2.6e-2,Gmin=1e-3):
if U > -5*U0:
return Is/U0*np.exp(U/U0)+Gmin
else:
return Gmin
La valeur de Gmin doit être assez petite pour ne pas modifier notablement la caractéristique de la diode mais elle doit être assez grande pour permettre la convergence de la méthode de Newton-Raphson.
Voici la fonction qui effectue une itération de Newton-Raphson :
from numpy.linalg import solve
def iteration_newton(V,ie,i,Ve,Gmin):
J = np.array([[deriv_Idiode(Ve-V,Gmin=Gmin),1],[-deriv_Idiode(-V,Gmin=Gmin),1]])
B = -np.array([ie-Idiode(Ve-V,Gmin=Gmin),Idiode(-V,Gmin=Gmin)+ie-i])
deltaX = solve(J,B)
V += deltaX[0]
ie += deltaX[1]
F = np.array([ie-Idiode(Ve-V,Gmin=Gmin),Idiode(-V,Gmin=Gmin)+ie-i])
res = F[0]*F[0]+F[1]*F[1]
return [V,ie],res
Voici la fonction qui donne la solution approchée par la méthode de Newton-Raphson. Un nombre d'itérations maximal est imposé, ce qui est utile en cas de non convergence de la méthode de Newton-Raphson. La fonction renvoie les valeurs de V,ie, le nombre d'itérations effectuées et la dernière valeur de res.
def newton(V,ie,i,Ve,eps=1e-4,maxiter=30,Gmin=1e-3):
next,res = iteration_newton(V,ie,i,Ve,Gmin)
niter = 1
while res > eps and niter<maxiter:
next,res = iteration_newton(next[0],next[1],i,Ve,Gmin)
niter+=1
return next[0],next[1],niter,res
Voici la fonction qui effectue la simulation du circuit :
def simulation2complete(E,f,L,R,tmax,dt,Gmin=1e-3):
w = 2*np.pi*f
t = 0
i = 0
ie = 0
V = 0
Ve = 0
data = [[t,i,ie,Ve,V,0,0]]
while t<tmax:
Ve = E*np.sin(w*t)
V,ie,niter,res = newton(V,ie,i,Ve,Gmin=Gmin)
i= i+(V-R*i)/L*dt
t +=dt
data.append([t,i,ie,Ve,V,niter,res])
data = np.array(data)
return data[:,0],data[:,1],data[:,2],data[:,3],data[:,4],data[:,5],data[:,6]
Voici une simulation, pour les mêmes paramètres qu'une simulation présentées plus haut avec les diodes idéales.
f=100
E=10
L=100e-3
R = 5
t,i,ie,Ve,V,niter,res = simulation2complete(E,f,L,R,0.1,1e-5,Gmin=1e-4)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
plot(t,niter,label="niter")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
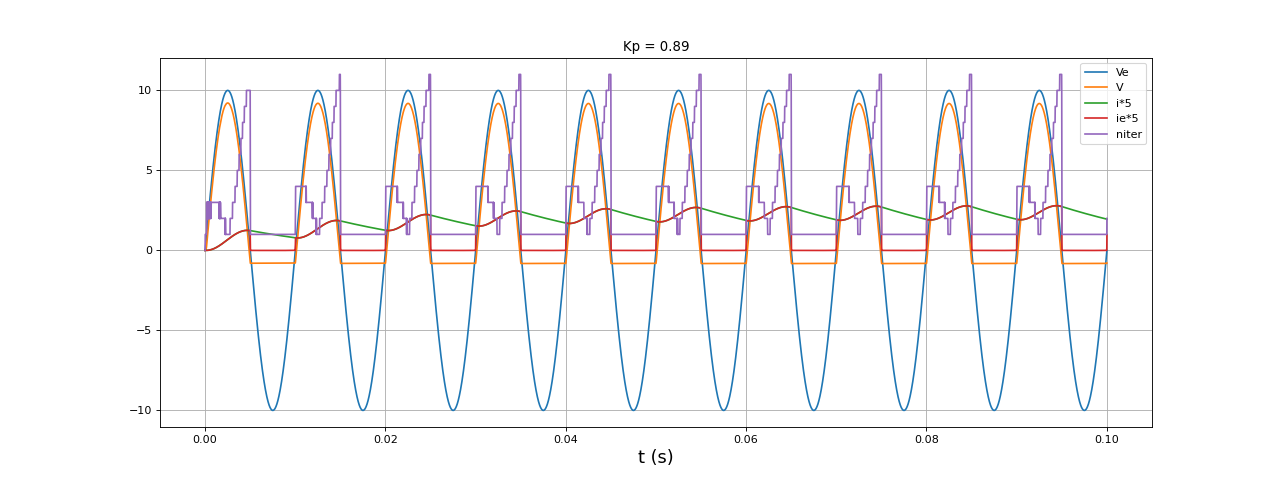 fig25.pdf
fig25.pdf
Le tracé du nombre d'itération dans la recherche de racines permet de contrôler le bon déroulement de l'algorithme de Newton-Raphson. Le nombre d'itérations augmente à certains moments du cycle mais sans jamais atteindre la limite (30), ce qui montre que tout fonctionne correctement. Voici le tracé de res en fonction du temps :
figure(figsize=(16,6))
plot(t,res)
grid()
xlabel("t (s)",fontsize=16)
ylabel("res",fontsize=16)
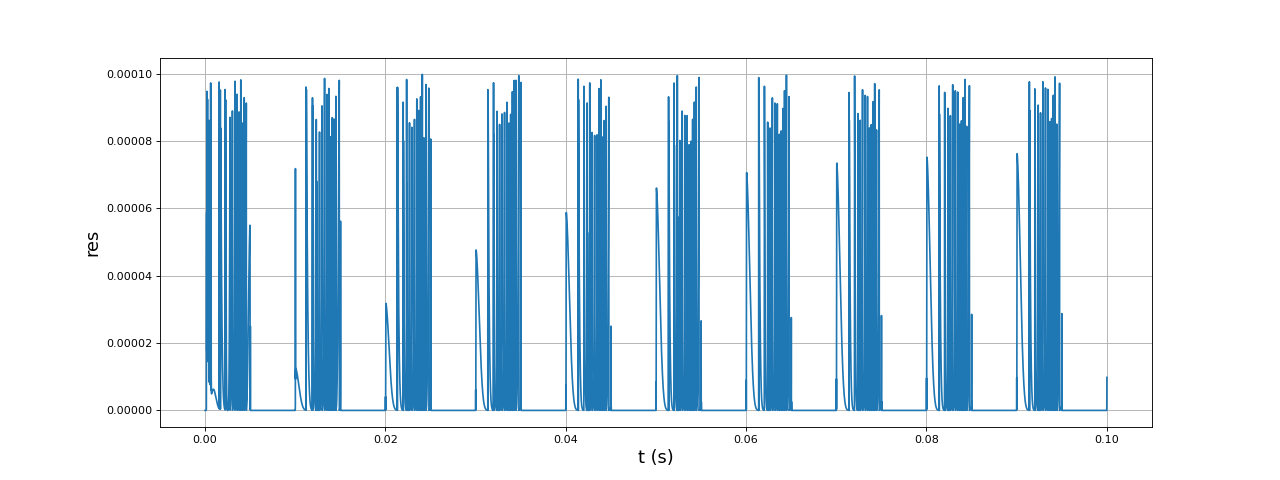 fig26.pdf
fig26.pdf
Les valeurs les plus grandes de res (toujours inférieures à la tolérance ) surviennent pendant la phase de conduction de la diode D1 et c'est aussi pendant cette phase que le nombre d'itération augmente (surtout au début et à la fin de cette phase).
Si on abaisse la valeur de Gmin jusqu'à 10-6, la simulation fonctionne et donne les mêmes courbes. En dessous de cette valeur, la convergence de la méthode de Newton-Raphson ne se fait plus. Inversement, une valeur trop grande modidie le résultat car la caractéristique de la diode est trop modifiée :
f=100
E=10
L=100e-3
R = 5
t,i,ie,Ve,V,niter,res = simulation2complete(E,f,L,R,0.1,1e-5,Gmin=1e-2)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
plot(t,niter,label="niter")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
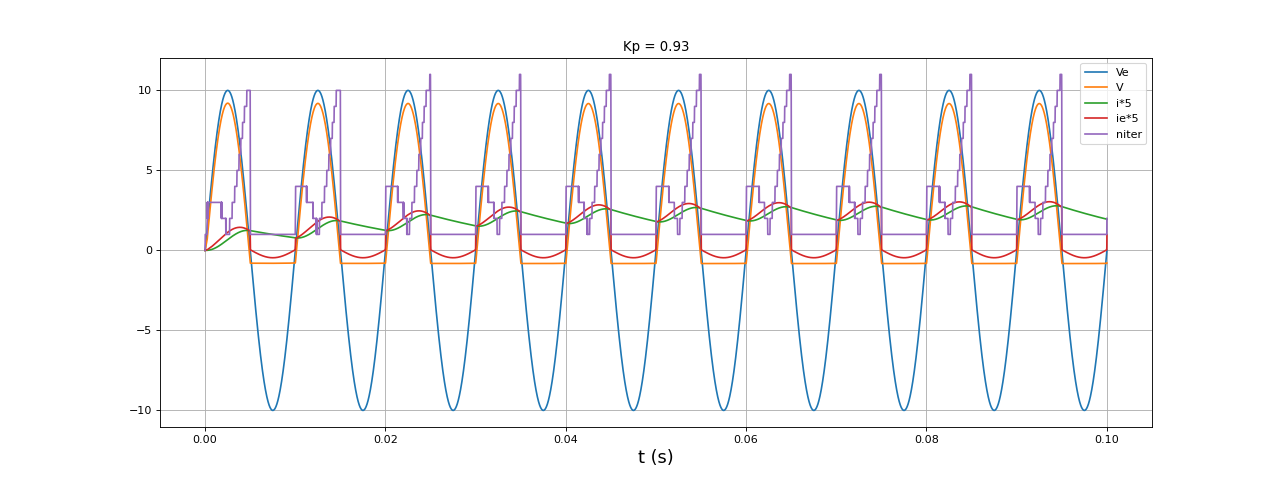 fig27.pdf
fig27.pdf
4.b. Exemple : redressement mono-alternance avec inductance de commutation
On reprend le circuit précédent en lui ajoutant une inductance de commutation :
Figure pleine page{kind=link}
Les inconnues sont V,i,ie,U1, soit une de plus que dans l'exemple précédent. Les équations sont :
Si i et ie sont connus, les deux dernières équations permettent de déterminer U1 et V. Contrairement à l'exemple précédent, ces deux équations sont indépendantes (non couplées). Cela vient de l'introduction de la tension U1 comme nouvelle variable, qui évite d'avoir une dérivée dans l'équation algébrique de la relation courant-tension de la diode D1. On utilisera cependant l'algorithme général de Newton-Raphson pour un système d'équations. Si l'on pose x0=U1 et x1=V on a :
La matrice jacobienne est :
C'est bien sûr une matrice diagonale puisque les deux équations sont indépendantes.
Le calcul de i et ie par la méthode d'Euler se fait par les deux équations :
Ces deux équations sont non couplées mais la méthode d'Euler s'appliquerait sans difficultés à des équations couplées. Il faut remarquer que ces équations sont très différentes de celles du même circuit sans Le (on ne pourra pas passer de celui-ci au précédent simplement en posant Le=0).
Cet exemple nous permet d'introduire des fonctions permettant de résoudre un système de N équations algébriques pour N variables.
def iteration_newton_N(X,F,J,N,param):
# X : liste de N nombres
# F : liste de N fonction de la forme F(X,param)
# J : liste de N listes de N fonctions de la forme F(X,param)
# param : liste de paramètres (variables intervenant comme paramètres constants dans la résolution)
matJ = np.zeros((N,N))
matF = np.zeros(N)
for i in range(N): # équation i
for j in range(N): # variable j
matJ[i,j] = J[i][j](X,param)
B = np.zeros(N)
for i in range(N):
B[i] = -F[i](X,param)
deltaX = solve(matJ,B)
nextX = X+deltaX
for i in range(N):
matF[i] = F[i](nextX,param)
res = np.sum(matF**2)
return nextX,res
def newton_N(X,F,J,N,param,eps=1e-4,maxiter=30):
niter = 0
start = True
while start or (res > eps and niter < maxiter):
start = False
nextX,res = iteration_newton_N(X,F,J,N,param)
X = nextX
niter += 1
return nextX,niter,res
Voici la fonction qui effectue la simulation du circuit :
def simulation3complete(E,f,Le,L,R,tmax,dt,Gmin=1e-3):
# param[0] : ie
# param[1] : i
# parama[2] : Gmin
def F0(X,param): return Idiode(X[0],Gmin=param[2])-param[0]
def F1(X,param): return Idiode(-X[1],Gmin=param[2])+param[0]-param[1]
F = [F0,F1]
def J00(X,param): return deriv_Idiode(X[0],Gmin=param[2])
def J01(X,param): return 0
def J10(X,param): return 0
def J11(X,param): return -deriv_Idiode(-X[1],Gmin=param[2])
J = [[J00,J01],[J10,J11]]
N = 2
w = 2*np.pi*f
t = 0
i = 0
ie = 0
V = 0
U1 = 0
Ve = 0
data = [[t,i,ie,Ve,V,U1,0,0]]
while t<tmax:
Ve = E*np.sin(w*t)
param = [ie,i,Gmin]
X = [U1,V]
nextX,niter,res = newton_N(X,F,J,N,param)
U1,V = nextX[0],nextX[1]
i= i+(V-R*i)/L*dt
ie = ie+(Ve-U1-V)/Le*dt
t +=dt
data.append([t,i,ie,Ve,V,U1,niter,res])
data = np.array(data)
return data[:,0],data[:,1],data[:,2],data[:,3],data[:,4],data[:,5],data[:,6],data[:,7]
f=100
E=10
Le = 10e-3
L=100e-3
R = 5
t,i,ie,Ve,V,U1,niter,res = simulation3complete(E,f,Le,L,R,0.1,1e-5,Gmin=1e-3)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
plot(t,niter,label="niter")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
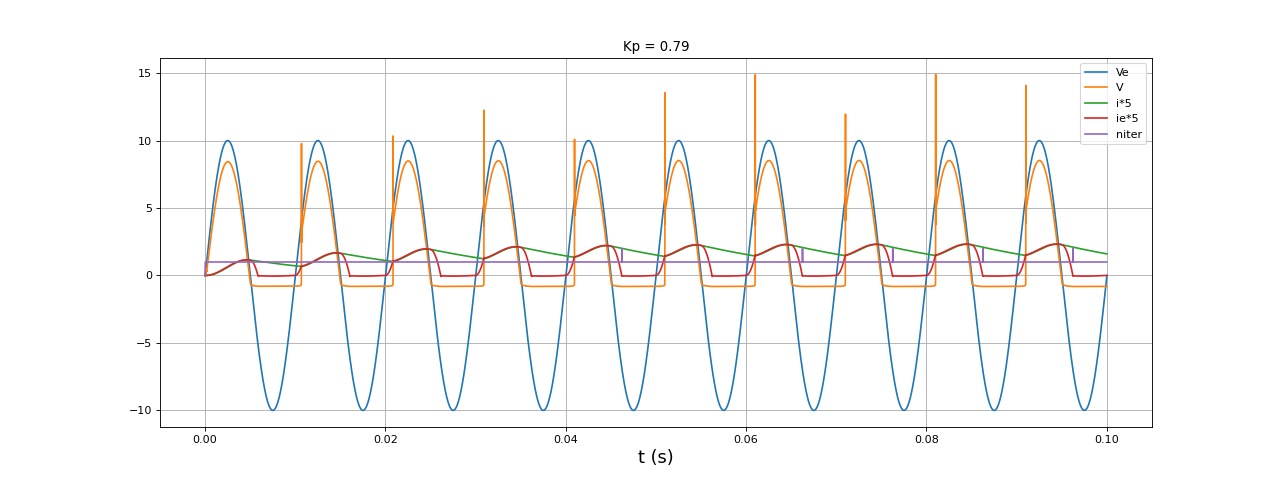 fig28.pdf
fig28.pdf
Pour ce circuit, une valeur Gmin de 10-4 ne fonctionne pas. Le résultat n'est pas satisfaisant : on observe un pic de la tension V à la fin de l'état 2. Réduisons le pas de temps :
f=100
E=10
Le = 10e-3
L=100e-3
R = 5
t,i,ie,Ve,V,U1,niter,res = simulation3complete(E,f,Le,L,R,0.1,1e-6,Gmin=1e-3)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
plot(t,niter,label="niter")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
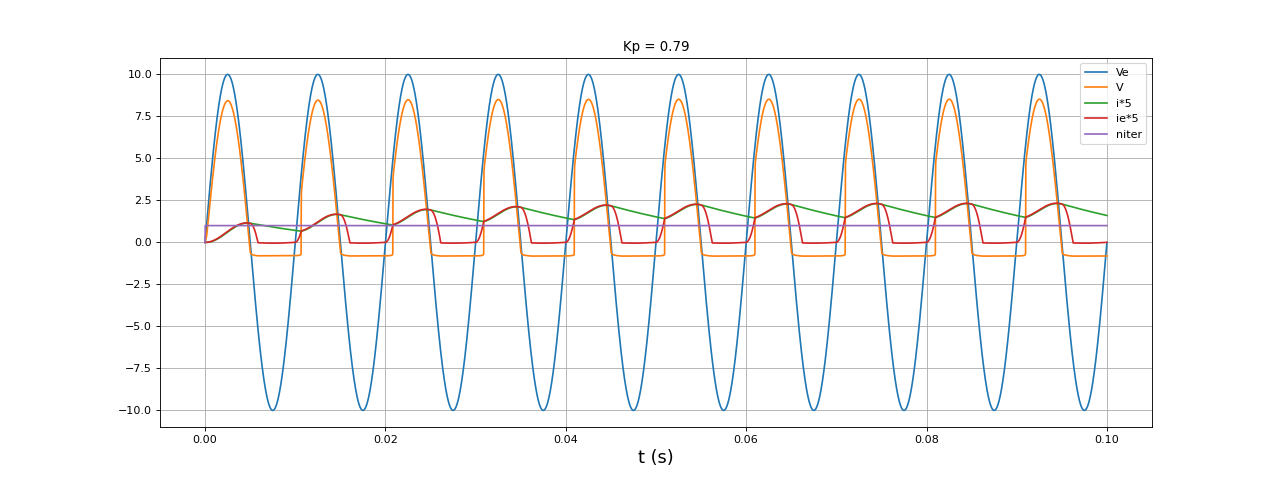 fig29.pdf
fig29.pdf
Le problème est bien résolu par abaissement du pas de temps mais le calcul est beaucoup plus long. Une méthode de Runge-Kutta avec adaptation du pas est donc indispensable.
4.c. Exemple : redressement double-alternance avec inductance de commutation
Figure pleine page{kind=link}
Les 11 variables sont :
Voici les 11 équations :
Nous pouvons immédiatement éliminer les variables i3,i4,V3,V4 :
Il reste 7 variables, c'est-à-dire le nombre de mailles (3) et de nœuds (4) du circuit.
À chaque itération, les valeurs de i et ie sont obtenues par la méthode d'Euler avec les deux premières équations. Les 5 autres équations sont résolues par la méthode de Newton-Raphson. Voici les variables et leur correspondance avec les variables notées xi :
Voici les fonctions F :
Voici le programme de simulation.
def simulation6complete(E,f,Le,L,R,tmax,dt,Gmin=1e-3):
# param[0] : ie
# param[1] : i
# parama[2] : Gmin
def F0(X,param): return param[1]-X[0]-X[1]
def F1(X,param): return Idiode(X[3])-X[0]
def F2(X,param): return Idiode(X[4])-X[1]
def F3(X,param): return Idiode(-X[2]-X[3])-X[0]+param[0]
def F4(X,param): return Idiode(-X[2]-X[4])+X[0]-param[0]-param[1]
F = [F0,F1,F2,F3,F4]
def J00(X,param): return -1
def J01(X,param): return -1
def J02(X,param): return 0
def J03(X,param): return 0
def J04(X,param): return 0
def J10(X,param): return -1
def J11(X,param): return 0
def J12(X,param): return 0
def J13(X,param): return deriv_Idiode(X[3])
def J14(X,param): return 0
def J20(X,param): return 0
def J21(X,param): return -1
def J22(X,param): return 0
def J23(X,param): return 0
def J24(X,param): return deriv_Idiode(X[4])
def J30(X,param): return -1
def J31(X,param): return 0
def J32(X,param): return -deriv_Idiode(-X[2]-X[3])
def J33(X,param): return -deriv_Idiode(-X[2]-X[3])
def J34(X,param): return 0
def J40(X,param): return 1
def J41(X,param): return 0
def J42(X,param): return -deriv_Idiode(-X[2]-X[4])
def J43(X,param): return 0
def J44(X,param): return -deriv_Idiode(-X[2]-X[4])
J=[[J00,J01,J02,J03,J04],[J10,J11,J12,J13,J14],[J20,J21,J22,J23,J24],[J30,J31,J32,J33,J34],[J40,J41,J42,J43,J44]]
N = 5
w = 2*np.pi*f
t = 0
i = 0
ie = 0
V = 0
V1,V2 = 0,0
i1,i2 = 0,0
Ve = 0
data = [[t,i,ie,Ve,V,0,0]]
while t<tmax:
Ve = E*np.sin(w*t)
param = [ie,i,Gmin]
X = [i1,i2,V,V1,V2]
nextX,niter,res = newton_N(X,F,J,N,param)
i1,i2,V,V1,V2 = nextX[0],nextX[1],nextX[2],nextX[3],nextX[4]
i= i+(V-R*i)/L*dt
ie = ie+(Ve-V1+V2)/Le*dt
t +=dt
data.append([t,i,ie,Ve,V,niter,res])
data = np.array(data)
return data[:,0],data[:,1],data[:,2],data[:,3],data[:,4],data[:,5],data[:,6]
f=100
E=10
Le = 10e-3
L=100e-3
R = 5
t,i,ie,Ve,V,niter,res = simulation6complete(E,f,Le,L,R,0.1,1e-6,Gmin=1e-3)
figure(figsize=(16,6))
plot(t,Ve,label="Ve")
plot(t,V,label="V")
plot(t,i*5,label="i*5")
plot(t,ie*5,label="ie*5")
plot(t,niter,label="niter")
xlabel("t (s)",fontsize=16)
grid()
legend(loc="upper right")
Kp = facteurP(t,Ve,ie,f)
title("Kp = %0.2f"%Kp)
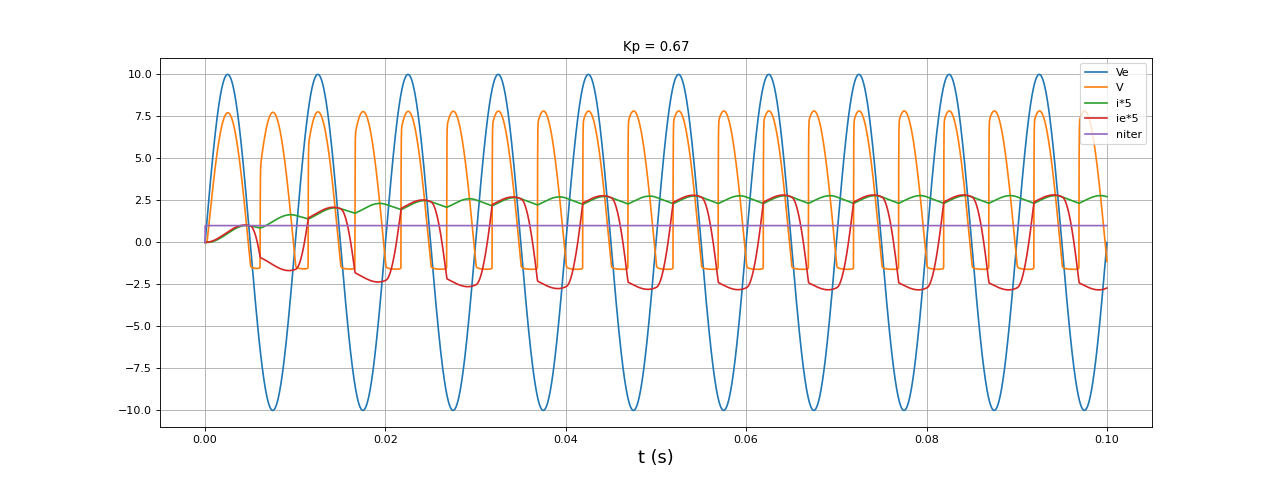 fig30.pdf
fig30.pdf